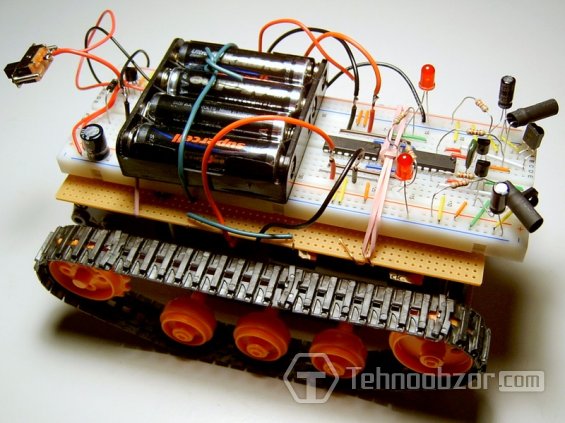
В этом проекте мы построим движущегося робота (платформу на гусеницах), который может обнаруживать и избегать препятствия. Он использует 2 инфракрасных датчика, представляющих собой пару излучающий ИК-светодиод и ИК-приемник, смонтированную в его передней левой и передней правой сторонах. ШИМ контроллер тут используется для управления скоростью моторов.
ИК-датчики установлены под углом 90° друг от друга, чтобы свести к минимуму интенсивность отраженных сигналов, поступающих на приемник из другой пары. Для этой же цели в ИК светодиоды поставить в короткие черные пластиковые трубочки.



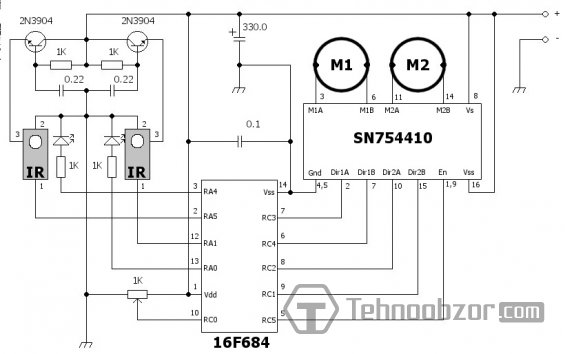
Схема гусеничного робота
Платформа базируется на гусеничном шасси какого-то автомобиля. Этот набор правда имел только один двигатель, который делает невозможным делать повороты. Пришлось установить на него двухмоторную коробку переключения передач с передаточным числом 200:1.
Питание и преобразователь
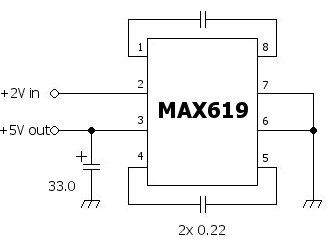
В принципе даже напряжения 3 В от 2-х батареек хватает чтобы двигаться довольно быстро. Однако, поскольку дополнительная электроника используется, чтобы изменить направление вращения двигателя, который потребляет изрядное количество тока от батареи, двигатель еле вращается. Поэтому в итоге 4xAA использовались для питания. Если всё-же нужно питать от 3 В или литиевой батарейки 3,7 В — для нормальной работы придётся использовать DC-DC преобразователь. Есть много вариантов, например MAX619 по схеме выше.
Драйвер двигателей схема
Драйвер электромотора на SN754410, хотя его и недостаточно для низковольтного применения. Так как он включает в себя биполярные транзисторы, они имеют падение напряжение не менее 0,7 В на каждом. Это значит, что моторы на самом деле получат на 1,4 вольта меньше от батареи, которое составляет около 50% потерь при 3 В питании. Другой недостаток этого решения заключается в том, что она нуждается в обширной охлаждения. Каждый из моторов потребляет около 200 мА, и микросхема рассеивает 2·1,4 В х 200 мА = 0,56 Вт тепла — нужен теплоотвод, что так же не способствует экономии батареи.
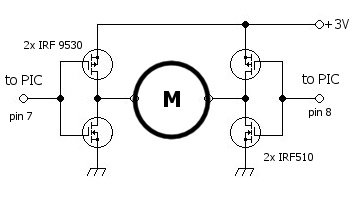
Еще одним способом создания драйвера двигателя является использование МОП-транзисторов. Эти устройства свободны от указанных выше ограничений на биполярных транзисторах. Тут использованы N-канальные МОП-транзисторы типа IRF510, чье сопротивление во включенном состоянии составляет 0,5 Ом. Поэтому они имеют только 0,5 Ом х 0,25 А = 0.125 В падение напряжения, которое является незначительным. В этом режиме транзистор рассеивает только (0.5 Ом)2 х 0,25 А = 0.06 Вт и может работать без теплоотвода. Лучшим выбором будет использование IRF520 чей канал имеет сопротивление 0.2 Ома.
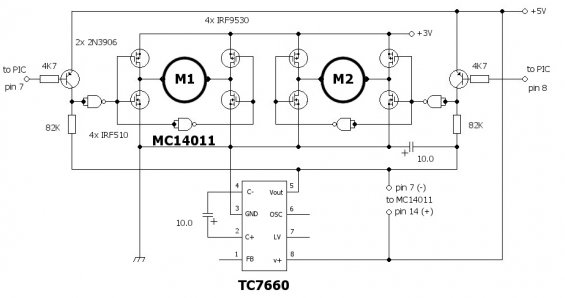
Транзисторы снабжены ограничивающими напряжение диодами. Для решения проблемы низкого питания добавлен DC-DC преобразователь на TC7660, что инвертирует 3 В в 5 В.
Регулировка чувствительности ИК-датчиков

ИК датчики имеют слишком высокую чувствительность для данного проекта. Они обнаруживают препятствия на расстоянии около 30 см. Таким образом ИК-приемники часто получают случайные отражения от других объектов, вызывающих сбой направления робота. Для изменения чувствительности был использован тот факт, что ИК модули имеют высокую чувствительность на 38 кГц. Опустившись на частоты вниз до приблизительно 33 кГц получится уменьшить чувствительность датчика примерно в 2 раза. Все файлы прошивки и видеоролик работы робота —
(3 Мб).
