В процессе разработки роботехники, исследовательская группа заметила, что при изменении только одного из параметров, четырёхколесный робот может начать менять свои шаги.
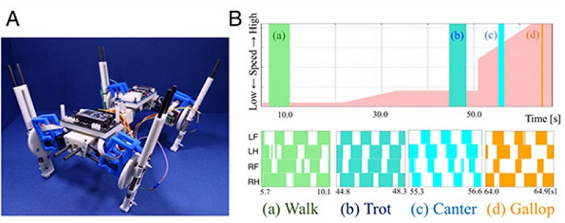
Исследовательская группа во главе с Акио Ишигуро и Даи Оваки из Университета Тохоку в Японии продемонстрировала, что четырёхколёсный робот может спонтанно менять свои шаги для повышения энергосбережения. До сих пор технология, по которой искусственный интеллект заставлял роботов менять свои шаги и траекторию, оставалась неизвестной.
Достичь такого результата ученые смогли при помощи децентрализованной схемы управления, применяя самое простое правило: поддерживая тело, нога также принимает на себя его вес. По словам исследователей, это поможет существенно расширить спектр применения. Открытие пригодится и для создания нетрадиционного подхода к разработке адаптивной роботехнической локомоции. Адаптивные роботы смогут работать в зонах бедствия. Также данный алгоритм можно будет использовать в процессе создания анимации компьютерной графики.
Более того, исследователи подтвердили, что энергоэффективность четырёхколёсного робота, который меняет скорость шагов будет существенно выше обычных моделей. Ожидается, что данное исследование поможет улучшить механизм управления. Таким образом четвероногие роботы смогут гибко и эффективно корректировать свою походку при изменении скорости. В результате, эффективность использования роботизированной техники увеличится: они начнут потреблять меньше энергии при более высокой скорости передвижения.
