Данная плата имеет компактные габариты, что позволяет применять её при управлении различными роботами, оснащёнными четырьмя колёсами. Схема может давать на каждую ось силу тока в 3 Ампера. Кроме того, она обеспечивает электропитание разного напряжения (от 12-ти до 48-ми вольт постоянного тока). Чтобы роботизированный механизм функционировал должным образом, рекомендуется проводить широтно-импульсную модуляцию (то есть изменять скважность электрических импульсов при наличии постоянной частоты; таким образом можно легко управлять мощностью всей системы).
Плата подходит для полноприводных колёсных роботов, при этом она даёт четкие сигналы на рулевые колеса (ведущие элементы могут поворачивать вправо и влево, а также на 360 градусов). Вся описываемая электроплата сконструирована на основе модуля LMD18201. Этот модуль как раз и нужен для управления подвижными устройствами. Вся система сочетает в себе биполярную схему CMOS (обеспечивает контроль над роботом) и модули DMOS (гарантируют подачу питания). Интегрирование указанных элементов осуществляется на основе монолитной технической структуры. Что касается конкретно двигателей, то плата подходит постоянным и шаговым разновидностям. В целом, архитектура схемы устроена так, чтобы во время эксплуатации роботизированных механизмов терялось минимум напряжения при подаче тока.
Особенности электроплаты:
- схема оснащена мощным двунаправленным драйвером двигателя;
- плата подходит роботам, имеющим компактные и средние габариты;
- имеются винтовые клеммы для подключения питания;
- присутствует шестиконтактный разъём для проведения широтно-импульсной модуляции;
- обеспечивается поставка силы тока на 3 Ампера для каждой оси;
- рабочее напряжение составляет 12–48 В постоянного тока;
- для платы характерны низкие показатели внутрисетевого сопротивления — около 0,3 Ом;
- имеется совместимость схем TTL и CMOS;
- плата может выдавать предупредительные сигналы при возрастании температуры до 145 градусов;
- имеется функция автоматического выключения при повышении температуры до 170 градусов;
- электроплата оснащена интегрированными зажимными диодами;
- присутствует внутренняя защита от короткого замыкания.
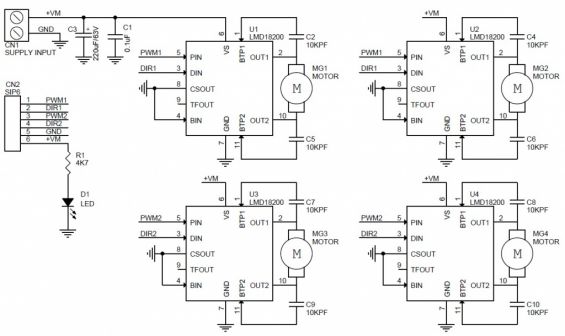
Далее демонстрируется схема работы двигателя для 4-колёсных роботов:
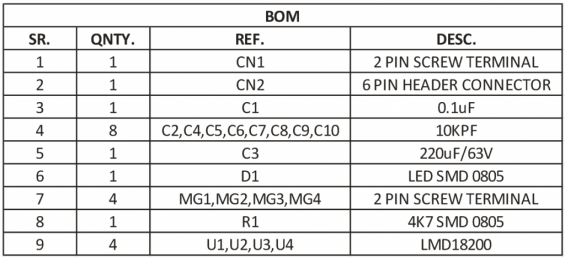
Затем идет полный перечень деталей, из которых состоит описываемая электроплата:
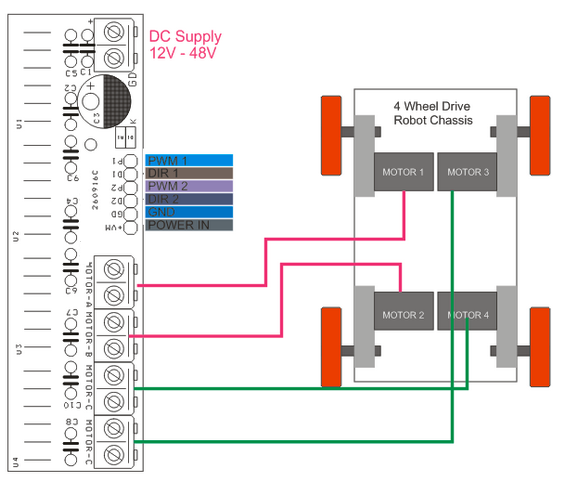
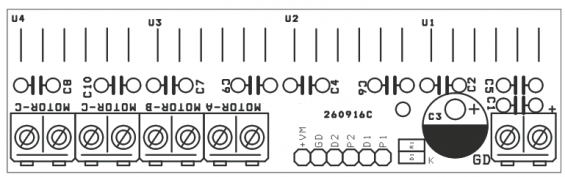
Ниже схематически показано то, как устроены коннекторы данного двигателя:
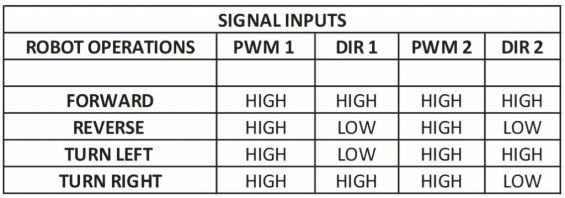
Далее перечислены функции платы:
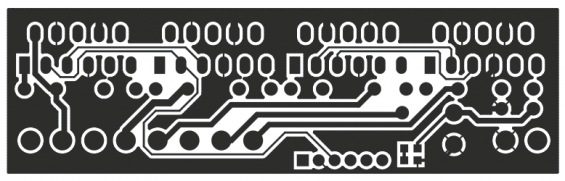
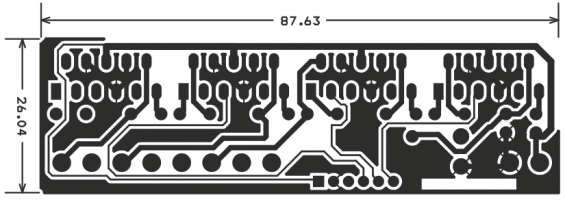
Завершаем нашу публикацию печатными платами двигателя для 4-колёсных роботов:
Файлы для скачивания:
